服务热线
0519-88188199
发布时间:2024-05-19 03:10:09 来源:168体育注册平台 作者:168体育app官网入口
⑸坐标系选择:关节坐标(JOINT)/基坐标(BASE)/工具坐标(TOOL)可循环切换,首先选择关节坐标(亦称各轴坐标)。
⑻坐标系变换为基坐标(BASE)和工具坐标(TOOL),再分别执行上述⑺的操作,同时记录下各运行动作状态。

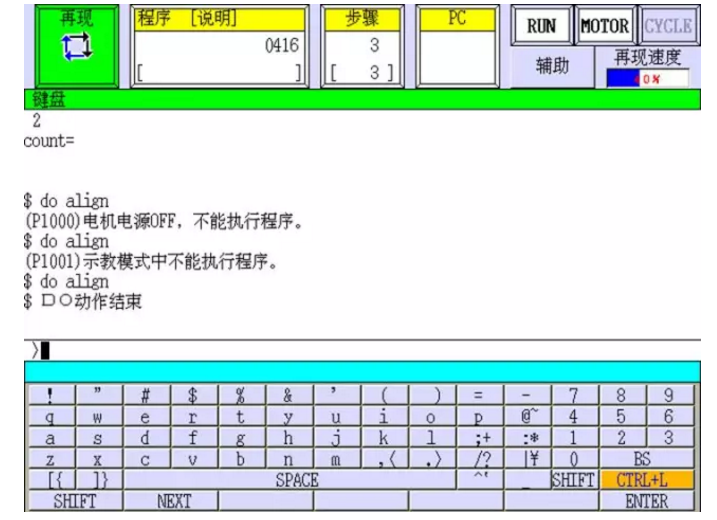
机器人可以执行各种单个的动作,各种命令在软键盘输入画面上输入,在命令前加DO”命令标识,按[ENTER]软键盘(参见下图)执行。下面列举常见的动作命令:
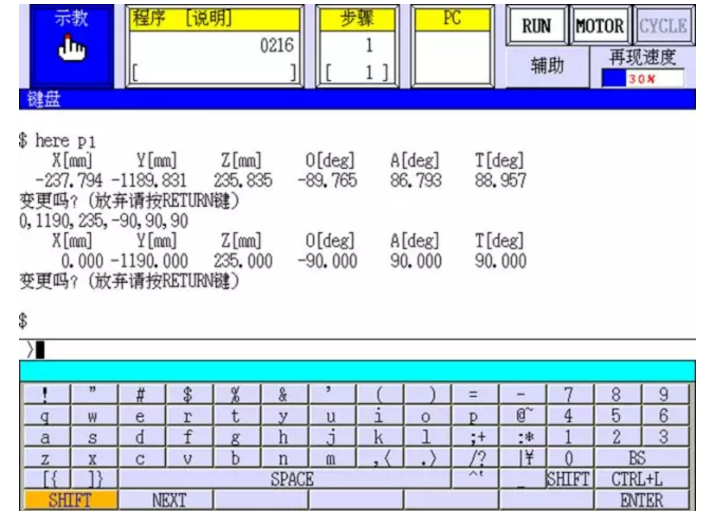
⑶ here p1 回车,会显示X、Y、Z、O、A、T各轴的坐标位置值,提示:变更吗?(放弃请按RETURN键)

如果要修改某点(如P1)的位置数据,只要在上述显示数据后(有提示信息:变更吗?(放弃请按RETURN键))直接输入各个数据即可,其中X、Y、Z三轴是以mm为单位的坐标值。O、A、T表示三个旋转坐标角度。

机器人可以设置2个原点,分别是HOME 和 HOME2,设置原点命令分别是:SETHOME, HERE 和 SET2HOME, HERE。将机器人手动操作运行到标准位置,然后执行上述命令即可。
机器人执行程序过程中或某阶段程序结束后,一般需停在原点位置“待机”,等待下一步命令,在程序中只要书写命令“HOME”或“HOME2”即可,而单独执行回原点功能,则在HOME或HOME2前加“DO”即可。注意,单独命令的执行都是在“再现”模式下进行的。

原点位置可以修改,一般用于位置稍微调整。在设置原点位置时,当提示“变更吗?”时,直接输入新的位置数据即可。

机器人从当前位置,在X、Y、Z方向上移动指定的距离,可以使用DRAW命令,该命令是在基坐标下以直线运动的方式移动的。
表示从当前位置在X轴方向前进100mm,在Y轴方向退回110mm,在Z轴方向上升200mm.。
⑴ 在再现模式下,进入[菜单]-[键盘],输入“here p1”,按两次回车键,将把当前位置记录在P1点中。
⑵输入“DO draw 100”,回车,机器人夹具将在X轴上移动100mm;输入“DO draw ,100”,回车,机器人夹具将在Y轴上移动100mm;输入“DO draw -100”,回车,机器人夹具将在X轴上反向移动100mm;输入“DO draw ,-100”,回车,机器人夹具将在Y轴上反向移动100mm。
⑶每执行一次“DO draw xxx”命令(xxx为移动距离),后面紧接着执行“here px”命令(x为2、3、4,p2、p3、p4为三个位置坐标),即可记录另外三个点。这样,p1、p2、p3、p4四个点将构成正方形的四个顶点,也可以是圆形上等分的四个点(参见后面圆形轨迹的编程)
上述正方形轨迹再现的操作中,将[JMOVE] 或 [LMOVE] (一共有4条)的第一、第三条改为C1MOVE;第二、第四条改为C2MOVE,即可实现圆形轨迹的再现。
在液晶屏的下部区域(C区)有两个显示区:显示区1和显示区2。每一个显示区都可以显示工业机器人的各种信息。
在前面我们通过圆弧指令(C1MOVE和C2MOVE)可以让机器人绘制一个封闭的圆弧轨迹。要实现机器人画圆还需要准确定义4个圆弧坐标的位置。通过上面的“HERE”和“DRAW”命令可实现每一个点的位置的修正。这里以“HERE”修改各位置数据的命令为例,来完成机器人画圆。
这样,修改位置数据后的P1、P2、P3、P4的四个点将在一个半径为200mm的圆上,通过再现,机器人就可以画圆了。